Masking, Limiting, and Related Functions
There are filters which change the video in various ways, and then there are ways to change the filtering itself. There are likely hundreds of different techniques at your disposal for various situations, using masks to protect details from smoothing filters, blending two clips with different filtering applied, and countless others—many of which haven’t been thought of yet. This article will cover:
- Masking and Merging
- Limiting
- Reference clips
- Expressions and Lookup Tables
- Runtime functions
- Pre-filtering
Masking
Masking refers to a broad set of techniques used to merge multiple clips. Usually one filtered clip is merged with a source clip according to an overlay mask clip. A mask clip specifies the weight for each individual pixel according to which the two clips are merged; see MaskedMerge for details.
In practice, masks are usually used to protect details, texture, and/or edges from destructive filtering effects like smoothing; this is accomplished by masking the areas to protect, e.g. with an edgemask, and merging the filtered clip with the unfiltered clip according to the mask, such that the masked areas are taken from the unfiltered clip, and the unmasked areas are taken from the filtered clip. In effect, this applies the filtering only to the unmasked areas of the clip, leaving the masked details/edges intact.
Mask clips are usually grayscale,
i.e. they consist of only one plane and thus contain no color information.
In VapourSynth, such clips use the color family GRAY
and one of these formats:
GRAY8 (8 bits integer),
GRAY16 (16 bits integer),
or GRAYS (single precision floating point).
std.MaskedMerge
This is the main function for masking that performs the actual merging. It takes three clips as input: two source clips and one mask clip. The output will be a convex combination of the input clips, where the weights are given by the brightness of the mask clip. The following formula describes these internals for each pixel:
$$
\mathrm{output} = \mathrm{clipa} \times (\mathit{maxvalue} - \mathrm{mask}) + (\mathrm{clip~b} \times \mathrm{mask})
$$
where \(\mathit{max~value}\) is 255 for 8-bit.
In simpler terms: for brighter areas in the mask, the output will come from clip b, and for the dark areas, it’ll come from clip a. Grey areas result in an average of clip a and clip b.
If premultiplied is set to True,
the equation changes as follows:
$$
\mathrm{output} = \mathrm{clipa} \times (\mathit{maxvalue} - \mathrm{mask}) + \mathrm{clip~b}
$$
Manipulating Masks
Building precise masks that cover exactly what you want is often rather tricky. VapourSynth provides basic tools for manipulating masks that can be used to bring them into the desired shape:
std.Minimum/std.Maximum
The Minimum/Maximum operations replace each pixel with the smallest/biggest value in its 3x3 neighbourhood. The 3x3 neighbourhood of a pixel are the 8 pixels directly adjacent to the pixel in question plus the pixel itself.
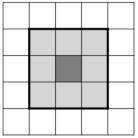 Illustration of the 3x3 neighborhood
Illustration of the 3x3 neighborhood
The Minimum/Maximum filters look at the 3x3 neighbourhood of each pixel in the input image and replace the corresponding pixel in the output image with the brightest (Maximum) or darkest (Minimum) pixel in that neighbourhood.
Maximum generally expands/grows a mask because all black pixels adjacent to white edges will be turned white, whereas Minimum generally shrinks the mask because all white pixels bordering on black ones will be turned black.
See the next section for usage examples.
Side note:
In general image processing,
these operations are known as Erosion (Minimum)
and Dilation (Maximum).
Maximum/Minimum actually implement only a specific case
where the structuring element is a 3x3 square.
The built-in morpho plug-in implements the more general case
in the functions morpho.Erode and morpho.Dilate
which allow finer control over the structuring element.
However, these functions are significantly slower than
std.Minimum and std.Maximum.
std.Inflate/std.Deflate
TODO
std.Binarize
Split the luma/chroma values of any clip into one of two values, according to a fixed threshold. For instance, binarize an edgemask to white when edge values are at or above 24, and set values lower to 0:
mask.std.Binarize(24, v0=0, v1=255)
For methods of creating mask clips, there are a few general categories…
Line masks
These are used for normal edge detection, which is useful for processing edges or the area around them, like anti-aliasing and deringing. The traditional edge detection technique is to apply one or more convolutions, focused in different directions, to create a clip containing what you might call a gradient vector map, or more simply a clip which has brighter values in pixels where the neighborhood dissimilarity is higher. Some commonly used examples would be Prewitt (core), Sobel (core), and kirsch (kagefunc).
There are also some edge detection methods that use pre-filtering when generating the mask. The most common of these would be TCanny, which applies a Gaussian blur before creating a 1-pixel-thick Sobel mask. The most noteworthy pre-processed edge mask would be kagefunc’s retinex_edgemask filter, which at least with cartoons and anime, is unmatched in its accuracy. This is the mask to use if you want edge masking with ALL of the edges and nothing BUT the edges.
Another edge mask worth mentioning is the mask in dehalohmod, which is a black-lineart mask well-suited to dehalo masking. Internally it uses a mask called a Camembert to generate a larger mask and limits it to the area affected by a line-darkening script. The main mask has no name and is simply dhhmask(mode=3).
For more information about edgemasks, see kageru’s blog post.
The range mask (or in masktools, the “min/max” mask) also fits into this category. It is a very simple masking method that returns a clip made up of the maximum value of a range of neighboring pixels minus the minimum value of the range, as so:
clipmax = core.std.Maximum(clip)
clipmin = core.std.Minimum(clip)
minmax = core.std.Expr([clipmax, clipmin], 'x y -')
The most common use of this mask is within GradFun3. In theory, the neighborhood variance technique is the perfect fit for a debanding mask. Banding is the result of 8 bit color limits, so we mask any pixel with a neighbor higher or lower than one 8 bit color step, thus masking everything except potential banding. But alas, grain induces false positives and legitimate details within a single color step are smoothed out, therefore debanding will forever be a balancing act between detail loss and residual artifacts.
Example: Build a simple dehalo mask
Suppose you want to remove these halos:
 Screenshot of the source.
Screenshot of the source.
 Point-enlargement of the halo area.
Point-enlargement of the halo area.
(Note that the images shown in your browser are likely resized poorly; you can view them at full size in this comparison.)
Fortunately, there is a well-established script that does just that: DeHalo_alpha.
However, we must be cautious in applying that filter, since, while removing halos reliably, it’s extremely destructive to the lineart as well. Therefore we must use a dehalo mask to protect the lineart and limit the filtering to halos.
A dehalo mask aims to cover the halos but exclude the lines themselves, so that the lineart won’t be blurred or dimmed. In order to do that, we first need to generate an edgemask. In this example, we’ll use the built-in Sobel function. After generating the edge mask, we extract the luma plane:
mask = core.std.Sobel(src, 0)
luma = core.std.ShufflePlanes(mask, 0, colorfamily=vs.GRAY)

luma
Next, we expand the mask twice, so that it covers the halos.
vsutil.iterate is a function in vsutil
which applies the specified filter a specified number of times
to a clip—in this case it runs std.Maximum 2 times.
mask_outer = vsutil.iterate(luma, core.std.Maximum, 2)

mask_outer
Now we shrink the expanded clip back
to cover only the lineart.
Applying std.Minimum twice
would shrink it back to the edge mask’s original size,
but since the edge mask covers part of the halos too,
we need to erode it a little further.
The reason we use mask_outer as the basis and shrink it thrice,
instead of using mask and shrinking it once,
which would result in a similar outline,
is that this way,
small adjacent lines with gaps in them
(i.e. areas of fine texture or details),
such as the man’s eyes in this example,
are covered up completely,
preventing detail loss.
mask_inner = vsutil.iterate(mask_outer, core.std.Minimum, 3)

mask_inner
Now we subtract the outer mask covering the halos and the lineart from the inner mask covering only the lineart. This yields a mask covering only the halos, which is what we originally wanted:
halos = core.std.Expr([mask_outer, mask_inner], 'x y -')

halos
Next, we do the actual dehaloing:
dehalo = hf.DeHalo_alpha(src)

dehalo
Lastly, we use MaskedMerge to merge only the filtered halos into the source clip, leaving the lineart mostly untouched:
masked_dehalo = core.std.MaskedMerge(src, dehalo, halos)

masked_dehalo
Diff masks
A diff(erence) mask is any mask clip generated using the variance of two clips. There are many different ways to use this type of mask: limiting a difference to a threshold, processing a filtered difference itself, or smoothing → processing the clean clip → overlaying the original grain. They can also be used in conjunction with line masks, for example: kagefunc’s hardsubmask uses a special edge mask with a diff mask, and uses core.misc.Hysteresis to grow the line mask into diff mask.
Example: Create a descale mask for white non-fading credits with extra protection for lines (16 bit input)
src16 = kgf.getY(last)
src32 = fvf.Depth(src16, 32)
standard_scale = core.resize.Spline36(last, 1280, 720, format=vs.YUV444P16, resample_filter_uv='spline16')
inverse_scale = core.descale.Debicubic(src32, 1280, 720)
inverse_scale = fvf.Depth(inverse_scale, 16)
#absolute error of descaling
error = core.resize.Bicubic(inverse_scale, 1920, 1080)
error = core.std.Expr([src, error], 'x y - abs')
#create a light error mask to protect smaller spots against halos aliasing and rings
error_light = core.std.Maximum(error, coordinates=[0,1,0,1,1,0,1,0])
error_light = core.std.Expr(error_light, '65535 x 1000 / /')
error_light = core.resize.Spline36(error_light, 1280, 720)
#create large error mask for credits, limiting the area to white spots
#masks are always full-range, so manually set fulls/fulld to True or range_in/range to 1 when changing bitdepth
credits = core.std.Expr([src16, error], 'x 55800 > y 2500 > and 255 0 ?', vs.GRAY8)
credits = core.resize.Bilinear(credits, 1280, 720)
credits = core.std.Maximum(credits).std.Inflate().std.Inflate()
credits = fvf.Depth(credits, 16, range_in=1, range=1)
descale_mask = core.std.Expr([error_light, credits], 'x y -')
output = kgf.getY(standard_scale).std.MaskedMerge(inverse_scale, descale_mask)
output = muvf.MergeChroma(output, standard_scale)
Single and multi-clip adjustments with std.Expr and friends
VapourSynth’s core contains many such filters, which can manipulate one to three different clips according to a math function. Most, if not all, can be done (though possibly slower) using std.Expr, which will be covered at the end of this sub-section.
std.MakeDiff and std.MergeDiff
Subtract or add the difference of two clips, respectively.
These filters are peculiar in that they work differently in
integer and float formats,
so for more complex filtering
float is recommended whenever possible.
In 8 bit integer format where neutral luminance (gray) is 128,
the function is \(\mathrm{clipa} - \mathrm{clipb} + 128\) for MakeDiff
and \(\mathrm{clipa} + \mathrm{clipb} - 128\) for MergeDiff,
so pixels with no change will be gray.
The same is true of 16 bit and 32768.
The float version is simply \(\mathrm{clipa} - \mathrm{clipb}\) so in 32 bit
the difference is defined normally,
negative for dark differences,
positive for bright differences,
and null differences are zero.
Since overflowing values are clipped to 0 and 255, changes greater than 128 will be clipped as well. This can be worked around by re-defining the input clip as so:
smooth = core.bilateral.Bilateral(src, sigmaS=6.4, sigmaR=0.009)
noise = core.std.MakeDiff(src, smooth) # subtract filtered clip from source leaving the filtered difference
smooth = core.std.MakeDiff(src, noise) # subtract diff clip to prevent clipping (doesn't apply to 32 bit)
std.Merge
This function is similar to MaskedMerge, the main difference being that a constant weight is supplied instead of a mask clip to read the weight from for each pixel. The formula is thus just as simple:
$$
\mathrm{output} = \mathrm{clipa} \times (\mathit{maxvalue} - \mathrm{weight}) + (\mathrm{clip~b} \times \mathrm{weight})
$$
It can be used to perform a weighted average of two clips or planes.
std.Expr
TODO
std.Lut and std.Lut2
May be slightly faster than Expr in some cases, otherwise they can’t really do anything that Expr can’t. You can substitute a normal Python function for the RPN expression, though, so you may still find it easier. See link for usage information.
Limiting
TODO
Referencing
TODO
Runtime filtering with FrameEval
TODO
Example: Strong smoothing on scene changes (i.e. for MPEG-2 transport streams)
from functools import partial
src = core.d2v.Source()
src = ivtc(src)
src = haf.Deblock_QED(src)
ref = core.rgvs.RemoveGrain(src, 2)
# xvid analysis is better in lower resolutions
first = core.resize.Bilinear(ref, 640, 360).wwxd.WWXD()
# shift by one frame
last = core.std.DuplicateFrames(first, src.num_frames - 1).std.DeleteFrames(0)
# copy prop to last frame of previous scene
propclip = core.std.ModifyFrame(first, clips=[first, last], selector=shiftback)
def shiftback(n, f):
both = f[0].copy()
if f[1].props.SceneChange == 1:
both.props.SceneChange = 1
return both
def scsmooth(n, f, clip, ref):
if f.props.SceneChange == 1:
clip = core.dfttest.DFTTest(ref, tbsize=1)
return clip
out = core.std.FrameEval(src, partial(scsmooth, clip=src, ref=ref), prop_src=propclip)
Pre-filters
TODO
Example: Deband a grainy clip with f3kdb (16 bit input)
src16 = last
src32 = fvf.Depth(last, 32)
# I really need to finish zzfunc.py :<
minmax = zz.rangemask(src16, rad=1, radc=0)
#8-16 bit MakeDiff and MergeDiff are limited to 50% of full-range, so float is used here
clean = core.std.Convolution(src32, [1,2,1,2,4,2,1,2,1]).std.Convolution([1]*9, planes=[0])
grain = core.std.Expr([src32, clean32], 'x y - 0.5 +')
clean = fvf.Depth(clean, 16)
deband =core.f3kdb.Deband(clean, 16, 40, 40, 40, 0, 0, keep_tv_range=True, output_depth=16)
#limit the debanding: f3kdb becomes very strong on the smoothed clip (or rather, becomes more efficient)
#adapt strength according to a neighborhood-similarity mask, steadily decreasing strength in more detailed areas
limited = zz.AdaptiveLimitFilter(deband, clean, mask=minmax, thr1=0.3, thr2=0.0, mthr1=400, mthr2=700, thrc=0.25)
output = fvf.Depth(limited, 32).std.MergeDiff(grain)